Project leader: Roel Pieters Personnel
Harsh and difficult to access environments, such as the tunnel infrastructure of LHC and Detectors assemblies (ALICE), can benefit from robots for remote access. Such access enables remote operators to tele-operate the robot for interventions, inspection and maintenance. Recent advances in deep 10learning for computer vision and robotics have opened up possibilities to develop intelligent machines and robots that are able to perform these tasks with very little human involvement. In addition, novel robotic systems offer different ways to interact with machinery from remote locations. Despite these advances, practical implementation and adoption of such enhanced interaction has not been demonstrated in real-world scenarios, nor has such technology been shown to benefit the operation of large-scale research facilities. The aim of this project is to develop robotic systems that utilize advanced artificial intelligence and virtual reality techniques to aid robotic tele-operation. The topics that are explored in this project are:
1. Design of continuum robot arm for inspection of ALICE detector
Assembly, maintenance and inspection of the ALICE detector is done mostly manual, but can benefit from robot-assisted tools for better views or for assisted assembly. As the detector is complex in shape and has narrow access, a small continuum robot design can navigate the space better than a human.
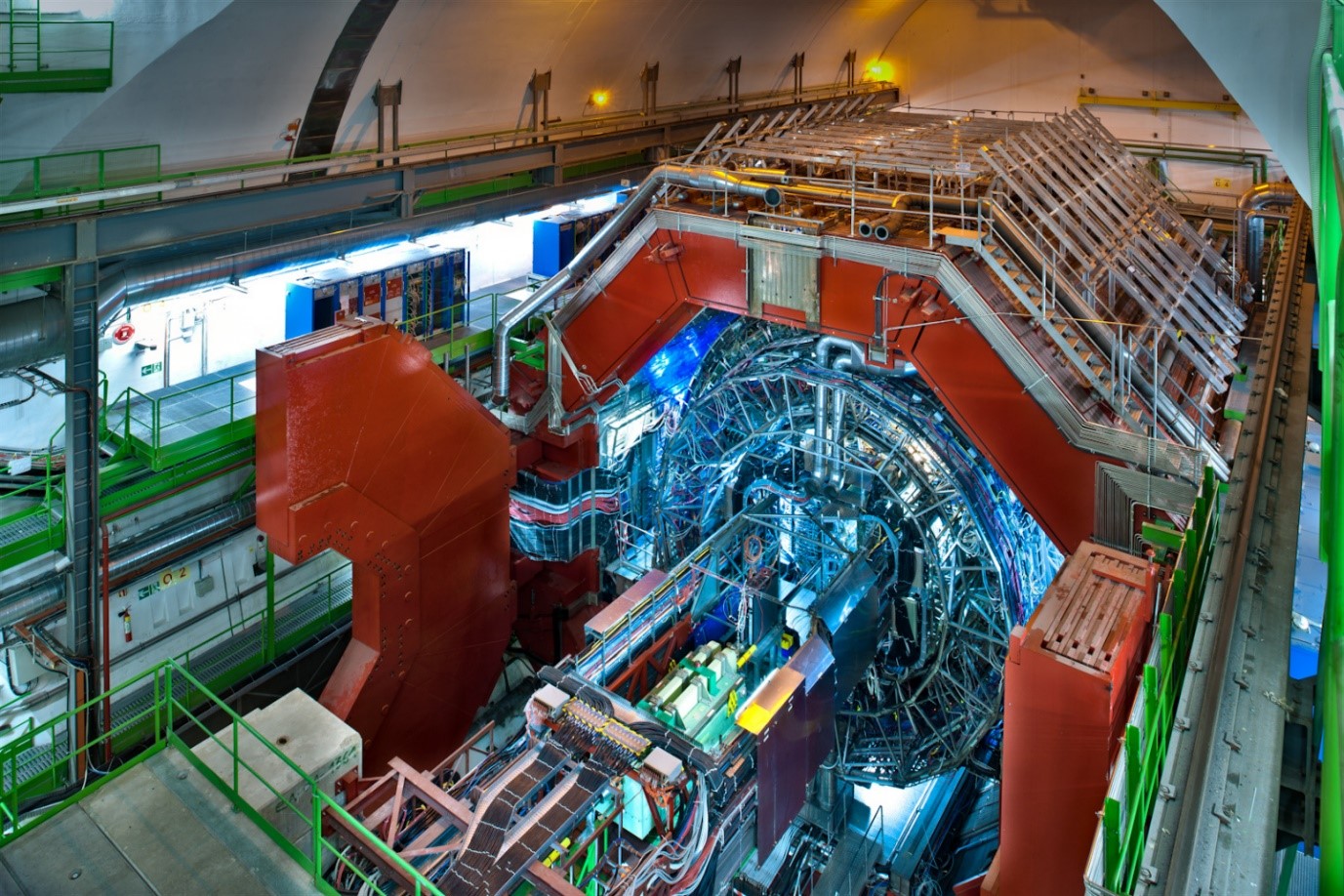
The ALICE experiment (Image: CERN)
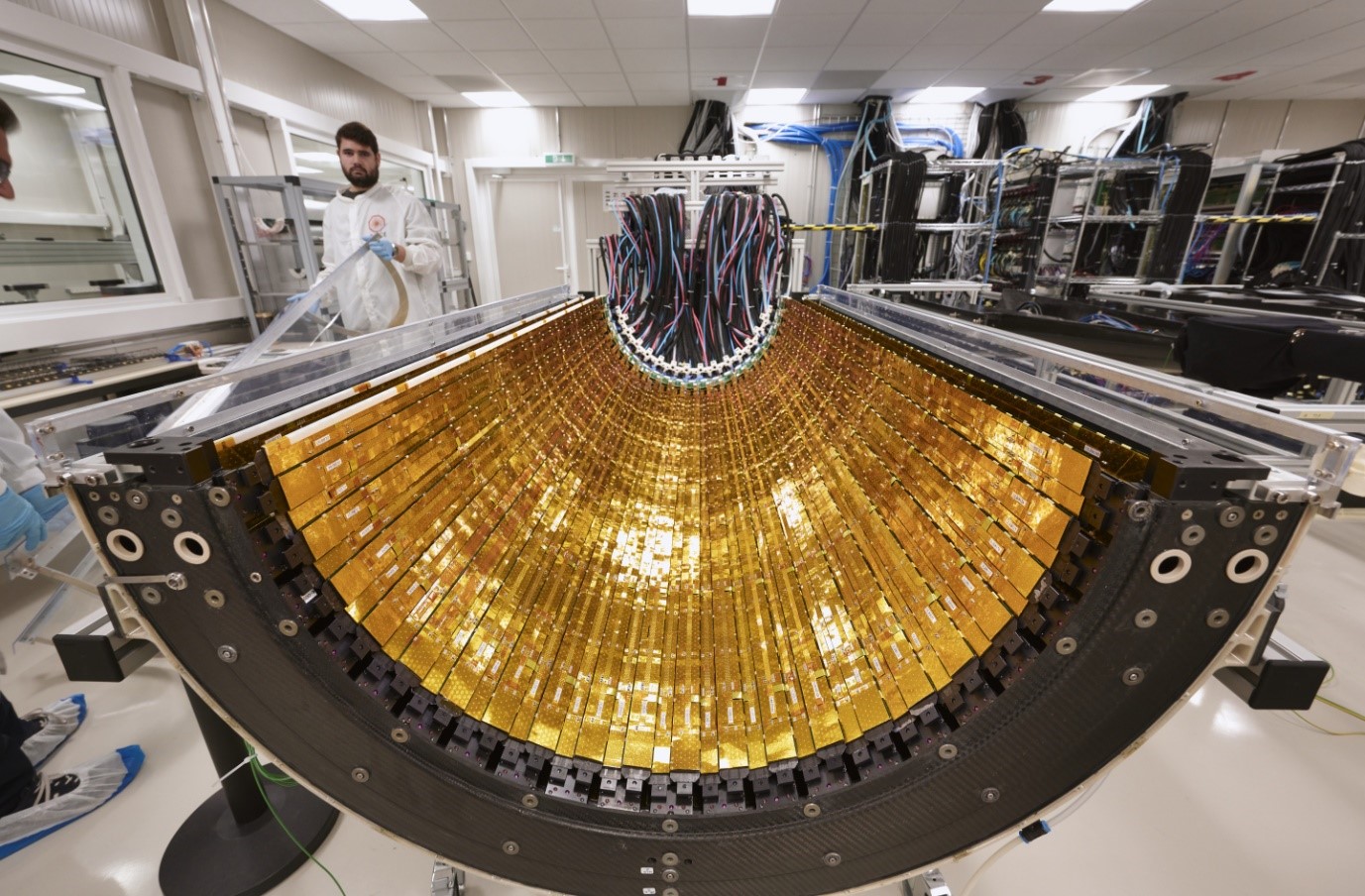
The various layers of ALICE’s inner tracker being assembled (Image: Maximilien Brice/CERN)
2. Enhanced robot tele-operation with artificial intelligence techniques
Localization, object detection and navigation in tunnels requires advanced computer vision methods. Machine and deep learning-based approaches offer robots such capabilities by utilizing training data that is obtained online (in real tunnels) or offline (in simulation).
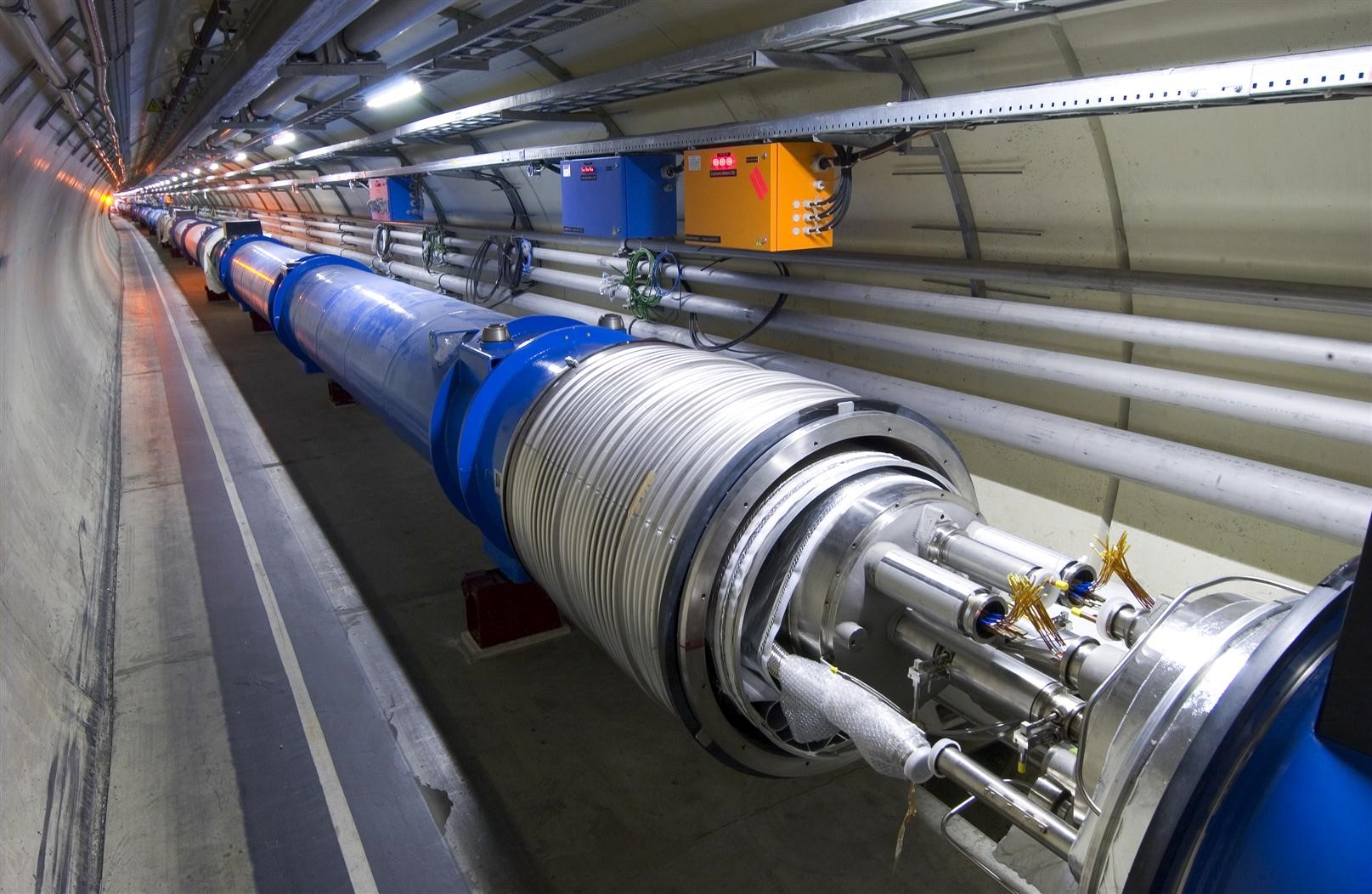
CERN LHC tunnel environment. (Image: CERN)
Both topics will enable enhanced, remotely tele-operated navigation, inspection and interventions in (CERN) tunnel environments. The aim of this project is to exclude human operators from harsh and dangerous environments. Such developments have not been achieved yet due to the difficulties in effective interaction between robots and humans: remote tele-operation of complex robotic systems by human operation is difficult due to the limitations in providing useful visual feedback (i.e. camera images displayed on computer screens). Current advances in AI and AR/VR can provide complete immersion in a remote environment by a tele-operated robot that accepts physical interaction as command input. We aim to realize these developments in this project. By taking the human out of these environments, safety considerations are no longer relevant and facilities can be used more efficiently.